物理量と単位¶
多くのコマンドでは、よく知られた物理量を単位として引数を指定できます。このページでは、各物理量の概要とその単位を説明します。
数値¶
- Number
数値は、整数と浮動小数点数で表すことができます。
引数の型が
Numberの場合、intとfloatのどちらでも指定できます。たとえば、
wait(15)とwait(15.75)はどちらも使えます。しかし、ほとんどの関数では、入力値はいずれにせよ整数に切り捨てられます。この例では、どちらのコマンドもプログラムを15ミリ秒だけ一時停止させます。注釈
ブースト ムーブハブは、システムリソースが限られているため、浮動小数点数をサポートしていません。このハブでは整数値のみを使えます。
Union[int,float]の別名です。
時間¶
時間: ms¶
時間や継続時間の値は、すべてミリ秒(ms)単位です。
たとえば、 run_time による動作の持続時間や、 wait の持続時間はミリ秒単位で指定されます。
角度と角運動¶
角度: deg¶
角度の単位はすべて度(deg)です。一回転は360度に相当します。
たとえば、 Motor や GyroSensor の角度の値は度で表されます。
回転速度: deg/s¶
回転速度、または角速度は、何かが回転する速さを表すもので、1秒間に何度回転するか(deg/s)で表されます。
たとえば、 Motor や GyroSensor の回転速度の値は deg/s で表されます。
プログラムでは deg/s を使うことをお勧めしますが、以下の表にしたがって一般的な単位に変換できます。
deg/s |
rpm |
|
1 deg/s = |
1 |
1/6=0.167 |
1 rpm = |
6 |
1 |
回転加速度: deg/s²¶
回転加速度、または 角加速度 は、回転速度の変化の速さを表します。これは、1秒間に何度変化するか(deg/s²)で表されます。一般的には \(deg/s^2\) とも表記されます
たとえば、モーターの回転加速度の設定を調整することで、一定速度の設定値に到達するまでのスムーズさや速さを変えられます。
距離と線運動¶
距離: mm¶
距離は可能な限りミリメートル(mm)で表現されます。
たとえば、 UltrasonicSensor の距離の値はミリメートルで計測されます。
プログラムではミリメートルで作業することを推奨しますが、以下の表にしたがって一般的な単位に変換できます。
mm |
cm |
inch |
|
1 mm = |
1 |
0.1 |
0.0394 |
1 cm = |
10 |
1 |
0.394 |
1 inch = |
25.4 |
2.54 |
1 |
寸法: mm¶
寸法は、距離と同じようにミリメートル(mm)で表します。
たとえば、車輪の直径はミリメートルで表されます。
速度: mm/s¶
線速度はミリメートル/秒 (mm/s)で表されます。
たとえば、ロボット車両の速度は mm/s で表されます。
線加速度: mm/s²¶
線加速度は、速度の変化の速さを表します。これは、1秒間の間の、1秒あたりのミリメートルの変化で表されます(mm/s²)。一般に \(mm/s^2\) とも表記されます。
たとえば、 DriveBase の加速度設定を調整することで、一定速度の設定値に到達するまでのスムーズさや速さを変更できます。
近似単位と相対単位¶
パーセント: %¶
値によっては特定の単位を持たないものもあります。それらは最小値(0%)から最大値(%)までの範囲をとります。パーセントで表す具体的なものとして、 相対距離 や 照度 があります。
他の例としては、音の大きさがあり、0% (無音)から100% (最大音量)までの範囲をとります。
相対距離: %¶
距離の計測するセンサーによっては、特定の単位で正確な値が得られず、非常に近い(0%)から非常に遠い(100%)までの範囲をとるものがあります。これらは相対距離と呼ばれます。
たとえば、 InfraredSensor の距離の値は相対距離です。
照度: %¶
ライトの照度はパーセンテージで表されます。ライトがオフのときは0%、ライトが完全にオンのときは100%となります。50%を選択した場合、これは人間の目には光が約半分の明るさとして認識されることを意味します。
圧力とトルク¶
圧力: N¶
圧力の値はニュートン(N)で表します。
プログラムではニュートンを使って作業することを勧めますが、次の表を使って他の単位に変換できます。
mN |
N |
lbf |
|
1 mN = |
1 |
0.001 |
\(2.248 \cdot 10^{-4}\) |
1 N = |
1000 |
1 |
0.2248 |
1 lbf = |
4448 |
4.448 |
1 |
トルク: mNm¶
トルクの値は、特に断りのない限り、ミリニュートン・メートル(mNm)で表します。
電気関連¶
電圧: mV¶
電圧の単位はミリボルト(mV)です。
たとえば、バッテリーの電圧を確認できます。
電流: mA¶
電流はミリアンペア(mA)単位で表します。
たとえば、バッテリーから供給される電流を確認できます。
エネルギー: J¶
蓄積エネルギーや消費エネルギーは、ジュール(J)で表せます。
電力: mW¶
電力は、エネルギーが蓄積または消費される割合です。ミリワット(mW)で表せます。
周囲環境¶
周波数: Hz¶
音の周波数はヘルツ(Hz)で表します。
たとえば、ビープ音の周波数を選ぶとピッチが変わります。
温度: °C¶
Temperature is measured in degrees Celsius (°C). To convert to degrees Fahrenheit (°F) or Kelvin (K), you can use the following conversion formulas:
\(^{\circ}\kern1pt\!F =\kern1pt^{\circ}\kern1pt\!C \cdot \frac{9}{5} + 32\).
\(K =\kern1pt^{\circ}\kern1pt\!C + 273.15\).
色相: deg¶
色の色相(0~359度)。
Reference frames¶
The Pybricks module and this documentation use the following conventions:
X: Positive means forward. Negative means backward.
Y: Positive means to the left. Negative means to the right.
Z: Positive means upward. Negative means downward.
To make sure that all hub measurements (such as acceleration) have the correct value and sign, you can specify how the hub is mounted in your creation. This adjust the measurements so that it is easy to see how your robot is moving, rather than how the hub is moving.
For example, the hub may be mounted upside down in your design. If you configure the settings as shown in 図 4, the hub measurements will be adjusted accordingly. This way, a positive acceleration value in the X direction means that your robot accelerates forward, even though the hub accelerates backward.
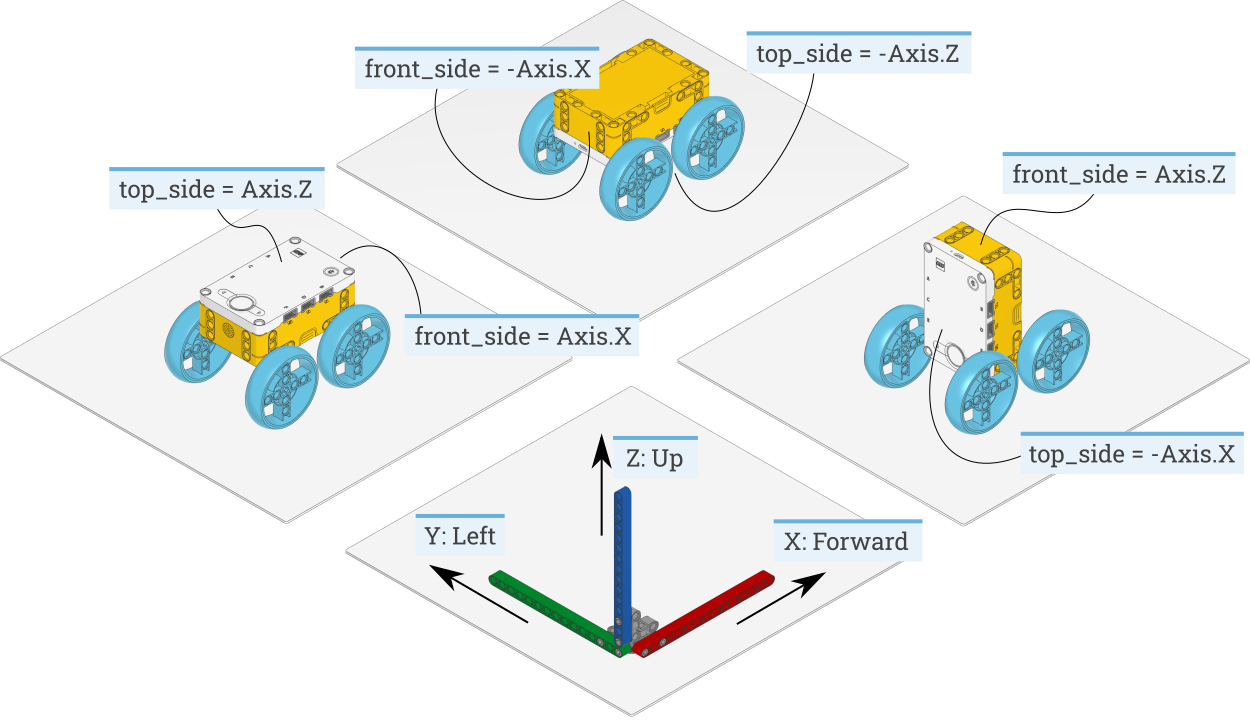
図 4 How to configure the top_side and front_side settings for three
different robot designs. The same technique can be applied to other hubs
and other creations, by noting which way the top and
front Side of the hub are pointing. The example
on the left is the default configuration.¶